
Simulador de Navegación y Maniobras – Simulador SIVCE / ECDIS
Simulador de navegación y maniobra
El simulador, consiste en un puente de navegación principal completo en escala real, de elevada tecnología, que incluye las consolas y controles que se encuentran en el puente de un buque moderno, incluida la columna de gobierno (manual y automática); los telégrafos de máquinas; propulsores transversales de proa y popa (si los tuviera el modelo a representar) y del tipo azimutal; los sistemas de comunicaciones; el control de anclas; repetidor de girocompás; etc. Además cuenta con otros puentes más, de menores dimensiones físicas, pero con similares prestaciones que el primero, que trabajan en relación y coordinadamente con el puente principal, lo que permite la interacción entre buques en un mismo escenario.
El sistema puede simular maniobras de navegación, atraque a muelles, boyas de amarre, empleo de cabos y remolcadores; todo tipo de fallas y eventos, navegación en aguas restringidas, tanto en el espacio horizontal del espejo líquido del agua, como vertical en profundidad. Simula asimismo diferentes condiciones hidrometeo-rológicas, con buena y mala visibilidad, tanto diurna como nocturna.
Cuenta con la capacidad de grabar las maniobras que se lleven a cabo de modo de extraer, posteriormente, a través de un análisis pormenorizado, las conclusiones técnicas correspondientes.



Certificaciones Internacionales
El software del simulador NAUTIS ha sido certificado por la DET NORSKE VERITAS de Noruega como “Integrated Simulator System, Tug, HSC”, “Full Mission” Class “A”, de acuerdo a los estándares de certificación DNV para simuladores marinos Nº Nº DNVGL-ST-0033 de abril de 2018.
Equipamiento del simulador
- Tres Puentes de navegación, coordinados e interactuando entre sí.
- Dos Radares, bandas “X” y “S”, con elevado realismo. Sistema ARPA (Automatic Radar Plotting Aid) asociado a los radares.
- AIS (Automatic Identification System).
- ECDIS (Electronic Chart Display and Information System).
- GMDSS (Global Maritime Distress and Safety System).
- SART (Search and Rescue Transmiter).
- Panel de Alarmas de sistemas de propulsión y máquinas auxiliares.
- Sistemas de comunicaciones internas y externas, radioeléctricas y visuales.
- Sistema de Binoculares y Taxímetros para marcaciones visuales.
- Timón automático.
- Controles de timón, telégrafos y thrusters de barcos reales.
- Control de los guinches de las amarras del buque.
- Idem de las anclas.
- Sala de “debriefing” para análisis de cada maniobra.
Desarrollo de Escenarios a medida
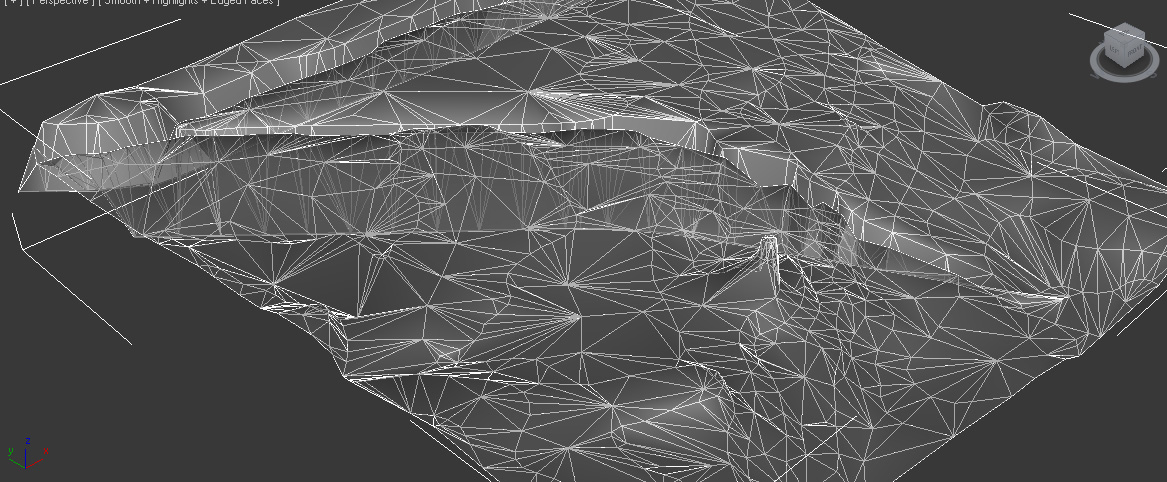
Obtenidos los datos necesarios (planos geográficos, cartografía digital preexistente, batimetría actualizada, datos de las corrientes, alturas máximas y mínimas en la zona y estudio histórico de vientos, entre otros), se procede a reproducir el escenario, partiendo de imágenes satelitales, archivos de elevaciones de la NASA, carta náutica electrónica de la zona a representar (formato S-57 o Raster) y se procesan sus entornos con otros programas de diseño en 3D. Se incluyen posteriormente todos los detalles que hagan a la batimetría, las corrientes y las ayudas a la navegación. El objetivo de esta etapa es llevar a cabo la digitalización de toda el área de interés, en los tres planos “X”; “Y”; y “Z” (tanto el perfil del fondo del canal / río, como las alturas terrestres).
Desarrollo de modelos de barcos
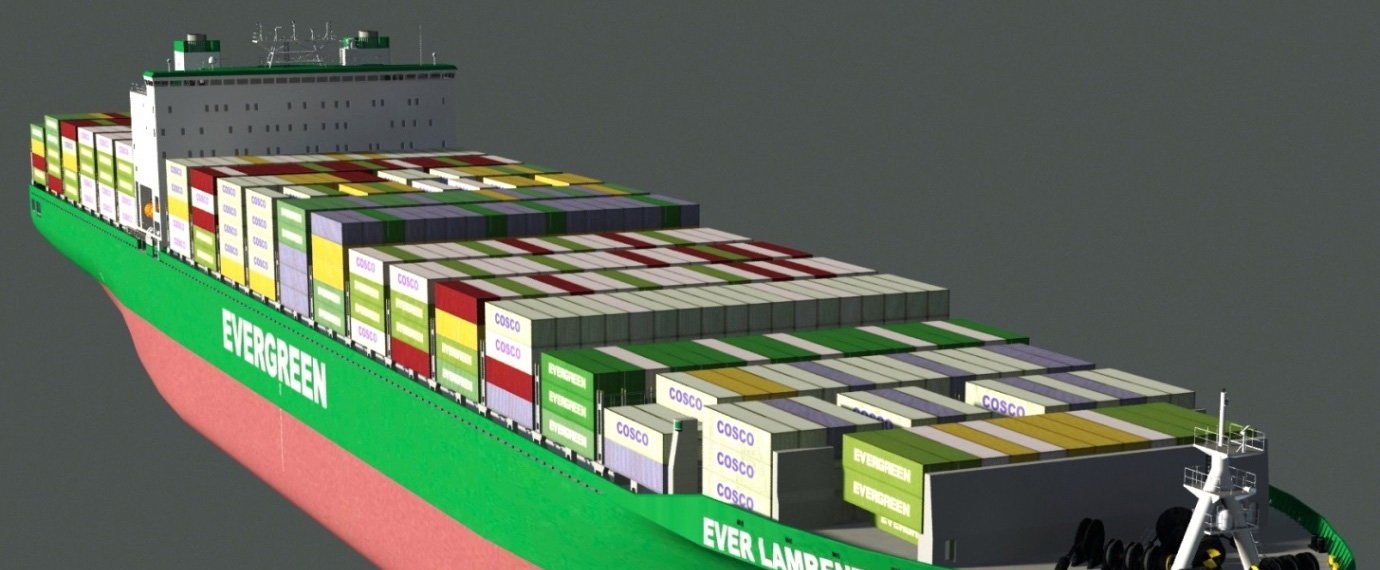
En el caso en que sea necesario hacerlo, es necesario contar con un plano de arreglo general de cubierta (perfil transversal y visto desde arriba) del barco, características del timón, hélice, datos de la propulsión y de thrusters, anclas, etc. De igual manera se necesita conocer el Coeficiente de Bloque, la Tabla de revoluciones de la hélice y a que posición del telégrafo y velocidad en alta mar corresponden. En el supuesto caso que no fuera posible obtener alguno de estos datos, se asumirán valores estándar internacionales. Un vez obtenidos los datos del barco se diseña primero su casco en una visión 3D y, posteriormente, se le incorporan al modelo todos los datos dinámicos, que determinarán el comportamiento del barco de una manera realista, para las diferentes condiciones hidrometeorológicas que se prueben (viento; corrientes; respuesta de las máquinas, hélices y timón; las fuerzas de remolque; etc.).
Capacidades técnico-operativas del simulador
- Representación de modelos de barcos de todo tipo, entre otros: petroleros; porta contenedores; bulk carriers; remolcadores de empuje (troncales y satelitales); embarcaciones rápidas; plataformas de explotación y exploración off-shore; buques supply a plataformas; embarcaciones recreativas; etc.
- Más de tres puentes de navegación, actuando de manera independiente en un mismo escenario.
- Puesto de control del ejercicio, con todas las facilidades para monitorear las acciones que se desarrollen durante el mismo.
- Posibilidad de retrotraer la práctica a un momento anterior y reiniciarla nuevamente desde esa posición.
Modelo matemático de maniobra de alta precisión
- Buques de tipología y dimensiones variadas.
- Todos los sistemas de gobierno y propulsión existentes actualmente con sus controles respectivos, según el tipo de embarcación que se simule.
- Seis grados de libertad de movimiento, en los tres planos “X”; “Y” y “Z”.
- Maniobras de aproximación, atraque y desatraque a muelles y / o a otros barcos fondeados (Alije / Top – Off) y a boya de carga.
- Operación de remolcadores convencionales y especiales.
- Maniobras de fondeo y levar anclas.
- Manejo de amarras.
- Efectos de interacción entre barcos que se cruzan o sobrepasan..
- Navegación en canales. Efectos que sufre un barco en aguas poco profundas. (Squat; veriles; bancos).
Influencias del entorno y ambientales
- Variación del viento local.
- Nivel de agua variable con el ciclo de la marea. Variación de la coloración del agua.
- Corrientes de intensidad y dirección local variables.
- Oleaje con altura, período y dirección variables.
- Maniobrabilidad afectada por profundidad reducida.
- Maniobras en aguas abiertas o restringidas.
- Maniobras de amarre a muelle o a otro barco.
Puente de navegación e instrumentos
- Consolas de control de timones y máquinas de propulsión.
- Indicadores de rumbo; velocidad; rpm; viento; ángulo del timón; régimen de caída del rumbo; conning; sonda; GPS; hora local.
- Consola de radares de 3 y 10 cm de longitud de onda, con ARPA y AIS asociados.
- Consola de comunicaciones internas y externas.
- Cartografía electrónica.
- Panel de alarmas de sistemas de abordo.
- Binoculares y taxímetro para la toma de marcaciones.
Características audiovisuales
- Alta calidad de las imágenes. Elevada velocidad de refresco de imagen.
- Representación de barcos y objetos con elevado nivel de detalle.
- Visión desde el puente de 270 grados; con giro del horizonte de 360°.
- Puntos de vista variables desde el puente (centro; alerones; otras direcciones).
- Visibilidad variable (diurna; crepuscular; nocturna; niebla; lluvia).
- Señales audibles y ruido ambiente normal en un puente.
Ship model data base
- Tratamiento del escenario, tanto en alturas como profundidades, con la utilización de las últimas herramientas tecnológicas basadas en información satelitaria de la NASA.
- Construcción de modelos tridimensionales de barcos.
- Reproducción del comportamiento de un barco específico, durante las maniobras en puerto y canal.
- Influencia sobre los modelos de agentes ambientales: viento; corriente; oleaje; marea; profundidad limitada.
SIMULADOR SIVCE / ECDIS


En enero de 2006 se inició un examen a fondo del Convenio de Formación de 1978 (STCW), que culminó en una Conferencia de las Partes en el Convenio de Formación, celebrada en Manila (Filipinas) del 21 al 25 de junio de 2010, en las que se adoptaron numerosas enmiendas al Convenio y al Código de Formación.
Las enmiendas actualizan las normas de competencia requeridas, en particular a la luz de las nuevas tecnologías, introducen nuevos requisitos y metodologías de formación y titulación.
La OMI ha previsto que en un plazo perentorio se forme a los oficiales en la operación eficiente del Sistema de Información y Visualización de Cartografía Electrónica (SIVCE / ECDIS) sugiriendo adoptar un programa Modelo OMI 1.27 para desarrollarlo, asistido por un simulador.
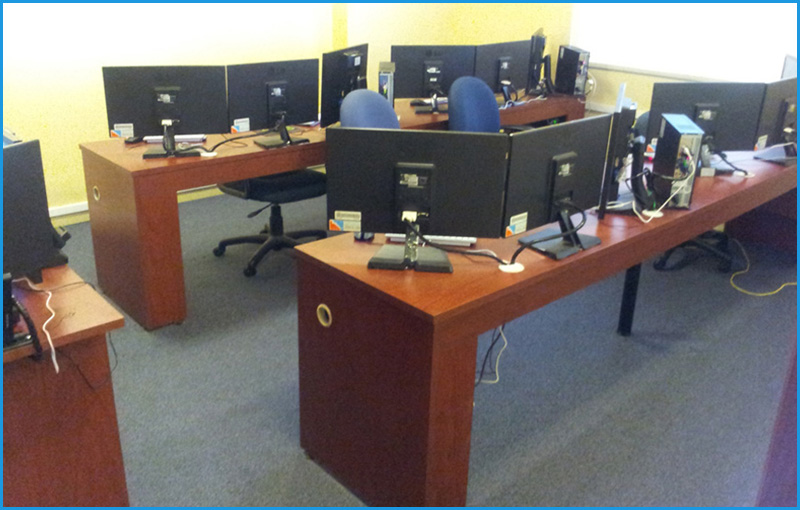
El CIEMF ha adquirido el ECDIS NAUTIS que permite capacitar hasta 8 alumnos en cuatro estaciones de barco independientes, contando con una estación más para los instructores.
Cada estación está integrada con un simulador NAUTIS de 2 pantallas y una tercera con un equipo SIVCE de Kelvin Hughes modelo “MANTA”, que permite representar la cartografía electrónica superpuesta con la información del radar / ARPA.
Según la etapa del entrenamiento en que se encuentren los participantes, el sistema admite trabajar con 1 barco y las 5 estaciones radar / ARPA y SIVCE asociados a él o con otra configuración, trabajando con 5 buques independientes, cada una asociada a su propio sistema SIVCE.
También se puede emplear el Simulador de puente y maniobra “NAUTIS” con 3 puentes, donde se pueden apreciar operando otros equipos SIVCE comerciales de diferentes fabricantes como el MARIS (noruego) y el QPS (holandés) modelo “QASTOR”.
El curso mencionado provee al alumno del conocimiento, habilidades y entendimiento del SIVCE y de las cartas electrónicas con el alcance requerido para una navegación segura, para ser operados en buques cuyo medio principal de navegación sea el SIVCE.