
Navigation and Maneuver Simulator – ECDIS Simulator
Navigation and Maneuver Simulator
The simulator, is made up of a complete, true to scale, ship’s bridge of cutting edge technology that includes: workstations and controls that are found on the bridge of a modern ship, including the steering workstation (manual and automatic); propulsion controls; docking workstation with bow and stern lateral thruster controls (if the model to be represented has them); communications systems; anchor windlass controls; gyrocompass repeater; etc. It also has two more bridges, of smaller dimensions but with similar features as the first one. They work in relation and coordination with the main bridge. This allows the interaction between ships in the same scenario.
The system allows the simulation of sailing maneuvers, docking, mooring to buoys, use of ropes and tugs, all sorts of failures and events, navigation in restricted waters, both in the size of the liquid surface as its depth. It also simulates different hydro-meteorological and visibility conditions, both for night and day.
It has the capability to record all maneuvers that are carried out so as to be able to extract, at a later date, through a detailed analysis, the respective technical conclusions.



International Certifications
NAUTIS simulator software has been certified by DET NORSKE VERITAS from Norway as “Integrated Simulator System, Tug, HSC”, “Full Mission” Class “A”, according to DNV certifications standars for maritime simulators (Nº 2.14, January 2011).
Download certificateSimulator’s features
- Three navigation bridges, coordinated and interactive.
- Two radars, “X” and “S” bands, with high realism.
- ARPA (Automatic Radar Plotting Aid) system, associated to the radars.
- AIS (Automatic Identification System).
- ECDIS (Electronic Chart Display and Information System).
- GMDSS (Global Maritime Distress and Safety System).
- SART (Search and Rescue Transmitter).
- Main and auxiliary engine systems alarm board.
- Internal and external communications systems, radio electric and visual.
- Binoculars and bearing measurement systems for visual bearing.
- Automatic rudder.
- Real ship rudder, engine and thruster controls.
- Debriefing room for the analysis of each maneuver.
- Windlass controls for ship’s mooring lines.
- Windlass controls for ship’s anchor.
Desarrollo de Escenarios a medida
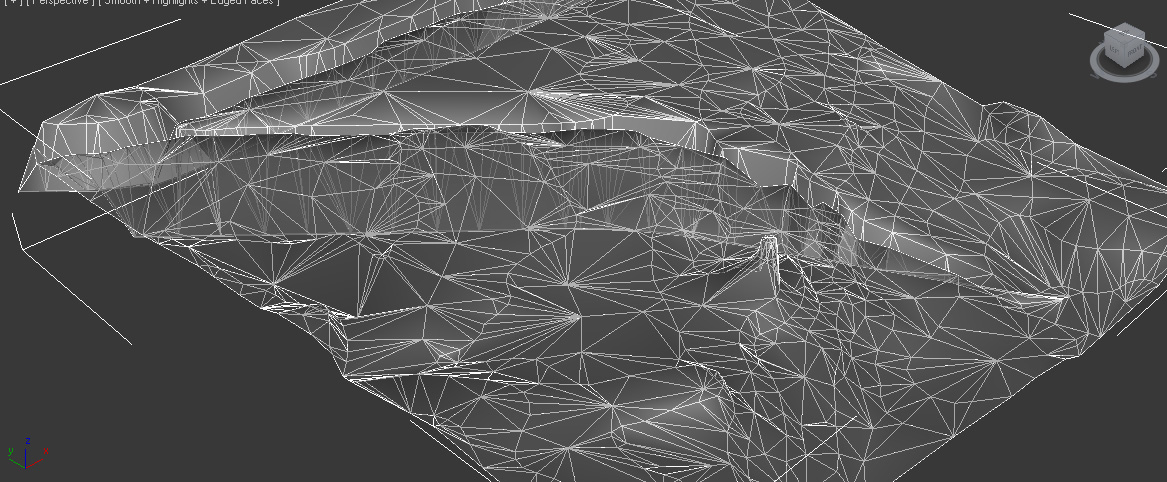
Obtenidos los datos necesarios (planos geográficos, cartografía digital preexistente, batimetría actualizada, datos de las corrientes, alturas máximas y mínimas en la zona y estudio histórico de vientos, entre otros), se procede a reproducir el escenario, partiendo de imágenes satelitales, archivos de elevaciones de la NASA, carta náutica electrónica de la zona a representar (formato S-57 o Raster) y se procesan sus entornos con otros programas de diseño en 3D. Se incluyen posteriormente todos los detalles que hagan a la batimetría, las corrientes y las ayudas a la navegación. El objetivo de esta etapa es llevar a cabo la digitalización de toda el área de interés, en los tres planos “X”; “Y”; y “Z” (tanto el perfil del fondo del canal / río, como las alturas terrestres).
Desarrollo de modelos de barcos
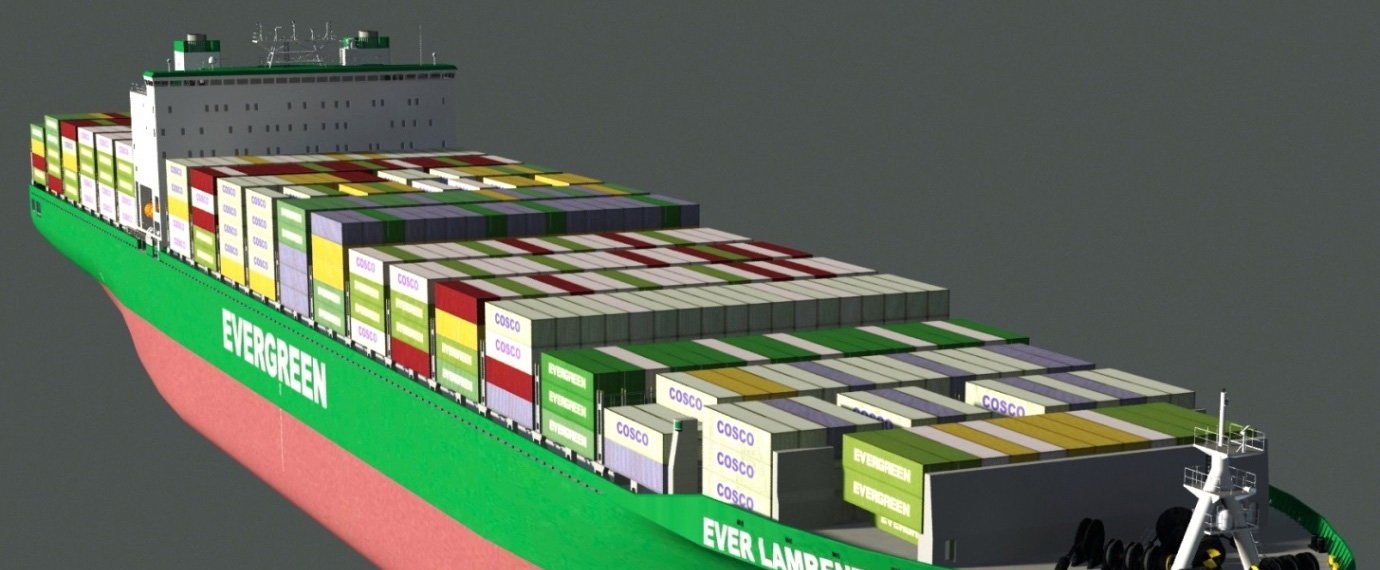
En el caso en que sea necesario hacerlo, es necesario contar con un plano de arreglo general de cubierta (perfil transversal y visto desde arriba) del barco, características del timón, hélice, datos de la propulsión y de thrusters, anclas, etc. De igual manera se necesita conocer el Coeficiente de Bloque, la Tabla de revoluciones de la hélice y a que posición del telégrafo y velocidad en alta mar corresponden. En el supuesto caso que no fuera posible obtener alguno de estos datos, se asumirán valores estándar internacionales. Un vez obtenidos los datos del barco se diseña primero su casco en una visión 3D y, posteriormente, se le incorporan al modelo todos los datos dinámicos, que determinarán el comportamiento del barco de una manera realista, para las diferentes condiciones hidrometeorológicas que se prueben (viento; corrientes; respuesta de las máquinas, hélices y timón; las fuerzas de remolque; etc.).
Simulators technical and operational capabilities
- Representation of all types of ship´s models, among others: tankers; container ships; bulk carriers; push boats; rapid vessels; off-shore exploration and exploitation; platform supply ships; recreational vessels; etc.
- Up to three navigation bridges, acting independently in the same scenario
- Exercise control station, with all the installations to monitor actions that are carried out.
- Possibility to carry back in time the exercise to a former moment and start it again from that position.
High Precision Mathematical Model
- Varied types and dimensions of ships
- All existing steering and propulsion systems with their respective controls according to the capability of the vessel that is simulated
- Six degrees of freedom of movement in the three planes “x”; “y” y “z”
- Approximation, mooring and departure maneuvers from wharves and other anchored ships (Off-loading / Top – Off) and to a loading buoy.
- Operation of conventional and special towboats
- Anchoring and departing maneuvers
- Handling of mooring lines
- Interaction effects of crossing and overpassing ships.
- Navigation in channels. Effects that a ship undergoes in shallow waters. (Squat; channel edges; banks).
Influences of the Environment
- Variation of the local wind.
- Variable water height in relation with the tide cycle. Variation of the water’s color.
- Local currents with variable intensity and direction.
- Waves with variable height, period and direction.
- Maneuvers affected by reduced depth.
- Maneuvers in open and restricted waters.
- Mooring to the wharf or another ship.
Navigation Bridge and Instruments
- Consolas de control de timones y máquinas de propulsión.
- Steering and propulsion workstation.
- Course; speed; rpm; wind; rudder angle; rate of change of course; conning; depth finder; GPS; local hour.
- 3 and 10 cm wave length radar console with ARPA and AIS associated.
- Internal and external communications workstation.
- Electronic charts.
- Shipboard systems alarm controls.
- Binoculars and gyrocompass repeaters for bearing measurement.
Audiovisual Characteristics
- High quality of images. High renewal speed of images.
- Representation of ships and other objects with a high level of detail.
- 270° view from the bridge; with 360° turn of horizon.
- Variable sighting points from the bridge (center; sides; other directions).
- Variable visibility (daytime; sunset/sunrise; night; fog; rain).
- Audible signals and normal bridge’s environmental noise.
Ship model data base
- Treatment of the scenario, both in heights as in depths, with the use of the last technological tools based on NASA satellite information.
- Construction of three-dimensional models of ships.
- Reproduction of the behavior of the specific ship, during port and channel maneuvers.
- Influence on the models of environmental agents: wind; current; wave; tide; limited depth.
ECDIS Simulator


In January 2006 a deep examination of the International Convention on Standards of Training, Certification and Watch Keeping for Seafarers 1978 (or STCW) was started and it ended in the Conference of the Parties in the Agreement on Training, held in Manila (Philippines) from the 21st to the 25th of June of 2010, in which a series of amendments to the Training Convention and Code were adopted.
The amendments updated the required rules of competence, particularly in light of the new technologies, that introduce new requisites and methods of training and qualification.
The IMO has anticipated that in a decisive period the officers must be trained in the efficient operation of the Electronic Chart Display and Information System (ECDIS) suggesting to adopt a program Model OMI 1.27 to develop it, assisted by a simulator.
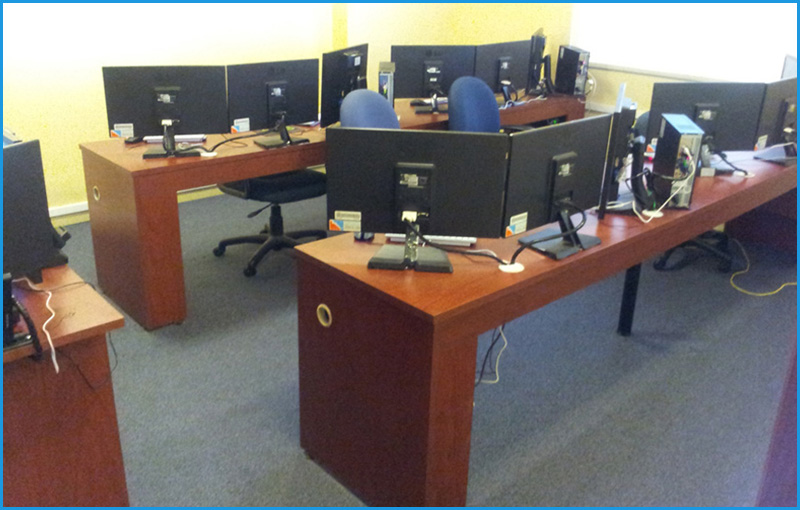
The CIEMF has purchased the ECDIS NAUTIS that allows the training of up to 8 students in four independent ship stations, having, as well, one more station for instructors.
Each station is integrated with a 2 screen NAUTIS simulator and a third with a Kelvin Hughes ECDIS equipment, model “MANTA”, that allows the representation of the electronic charting superimposed with the information of the radar/ARPA.
According to the training stage in which the participants are, the system allows working with 1 ship and the 5 radar stations/ARPA and ECDIS associated with it or with another setup, working with 5 independent ships, each one associated to its own ECDIS system.
The bridge and maneuver simulator “NAUTIS” with 3 bridges can also be used, where it can be seen operating with other commercial ECDIS from different manufacturers: MARIS (Norwegian) and QPS (Dutch) model “QASTOR”.
The aforementioned course supplies knowledge, ability and understanding to the student of the ECDIS and electronic charts with the required scope for a safe navigation and to be operated in ships whose main navigation aid is the ECDIS.